Computational Modelling
Formal models of perception, timing, movement, and interaction
Computational modelling is used to explain perceptual decisions, predict behaviour, and guide the design of interactive systems. The work includes Bayesian cue integration, Kalman filtering, signal processing, simulation, data-driven haptic rendering, psychometric modelling, movement analysis, and machine learning.
The same perspective also shapes my teaching in Mind, Brain, and Models. In that module, students use computational models as working theories: they simulate perceptual and cognitive systems, compare alternative explanations quantitatively, and learn how assumptions about uncertainty, evidence, prior knowledge, and decision rules change the behaviour a model predicts.
Many of the research models address uncertainty. Sensory signals are noisy, delayed, context-dependent, and often only indirectly related to the property being judged. Formal models help explain how people combine evidence across modalities, how expectations shape perceived timing, why visual-haptic conflicts change perceived stiffness, and how tactile information may be encoded by skin and mechanoreceptor systems.
Model families
The computational modelling strand spans several complementary approaches. Bayesian and statistically optimal models are used to ask how observers should combine uncertain evidence, and where human behaviour follows or departs from those predictions. These models are especially useful for multisensory perception, visual-haptic integration, body ownership, depth, timing, and causal inference.
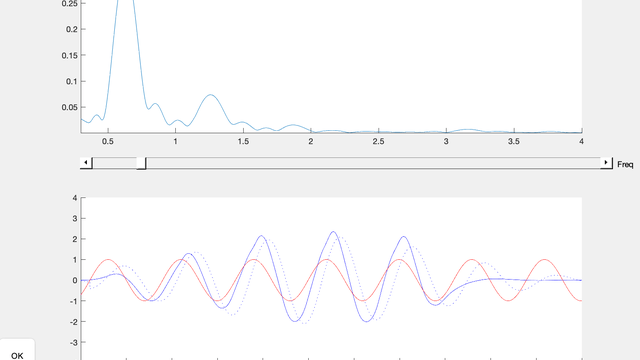
Dynamic models describe how perception and action unfold over time. Kalman-filter and feedback-correction models capture how people update predictions in response to changing sensory evidence, including musical synchronisation and temporally structured environments. Evidence-accumulation and diffusion-style models connect perceptual uncertainty to response time, accuracy, and speed-accuracy trade-offs.
Simulation models make hidden mechanisms explicit. In haptics and touch, simulations of skin, mechanoreceptors, tactile ageing, surface contact, vibration, and compliance help link physical interaction to the signals available for perception. In movement research, kinematic models and analysis pipelines describe trajectories, biological motion, grasping, locomotion, and the timing of coordinated action.
Data-driven and signal-processing models support the translation of perceptual knowledge into interactive systems. They are used to analyse timing accuracy, extract meaningful structure from XR datasets, transform touch signals into responsive haptic or auditory feedback, and design perceptually grounded interaction techniques for VR, AR, and wearable devices.
From models to experiments
Models are most useful when they make contact with behaviour. A model can generate a predicted psychometric function, estimate a point of subjective equality, describe a just-noticeable difference, predict a response-time distribution, or identify which variables should matter in a new experiment. This makes modelling a practical part of experimental design rather than a separate post-hoc explanation.
This approach also makes disagreement productive. When a model fails, the failure can reveal a missing prior, an incorrect noise assumption, an unmodelled delay, a change in strategy, or a perceptual cue that the experiment did not explicitly control. The goal is not simply to fit data, but to use models to sharpen the questions asked by psychophysics, neuroscience, HCI, haptics, and XR research.
The modelling strand also supports open resources and technology translation. It underpins datasets and catalogues for XR interaction, tools for timing and psychometric analysis, models of musical synchronisation, simulations of tactile ageing, and methods for turning perceptual knowledge into haptic rendering, VR measurement, and human-machine interaction systems.
Key Questions
Related Keywords
Portfolio and Resources
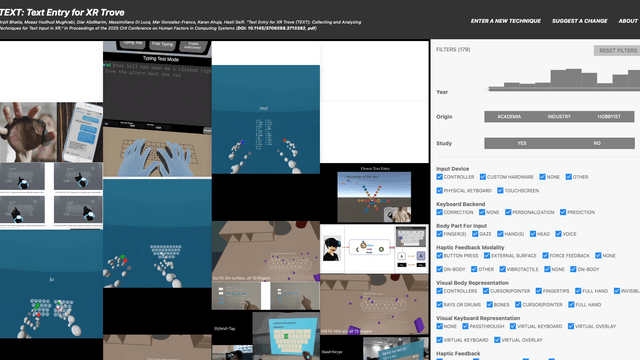 XR Text Trove
Open catalogue and analysis of XR text entry techniques, connected to the CHI 2025 TEXT paper and Google-supported research.
XR Text Trove
Open catalogue and analysis of XR text entry techniques, connected to the CHI 2025 TEXT paper and Google-supported research.
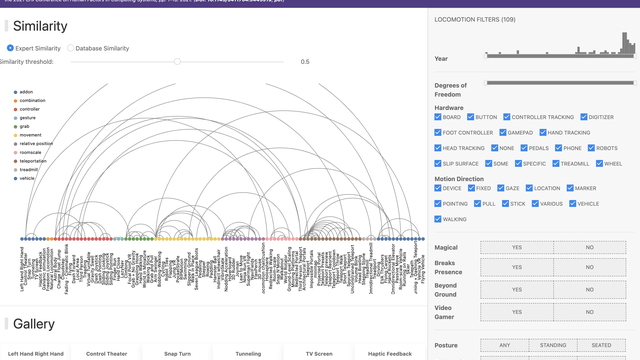 Locomotion Vault
Public resource for analysing, comparing, and standardising VR locomotion techniques.
Locomotion Vault
Public resource for analysing, comparing, and standardising VR locomotion techniques.
 VR delay measurement code
Software supporting reproducible measurement of end-to-end latency in virtual reality systems, linked to work on timing accuracy in psychophysical and XR experiments.
VR delay measurement code
Software supporting reproducible measurement of end-to-end latency in virtual reality systems, linked to work on timing accuracy in psychophysical and XR experiments.
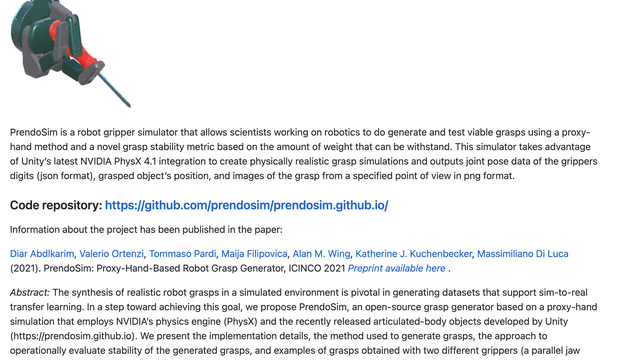 PrendoSim software
Proxy-hand-based robot grasp generation software for studying, simulating, and demonstrating object handovers.
PrendoSim software
Proxy-hand-based robot grasp generation software for studying, simulating, and demonstrating object handovers.
 Virtuoso Strings dataset
Open string ensemble recordings, scores, and onset annotations for timing analysis, automatic music transcription, and ARME research.
Virtuoso Strings dataset
Open string ensemble recordings, scores, and onset annotations for timing analysis, automatic music transcription, and ARME research.
 Aging Touch website
Public research resource on tactile perception, ageing, and surface texture perception, linked to BBSRC-supported work.
Aging Touch website
Public research resource on tactile perception, ageing, and surface texture perception, linked to BBSRC-supported work.
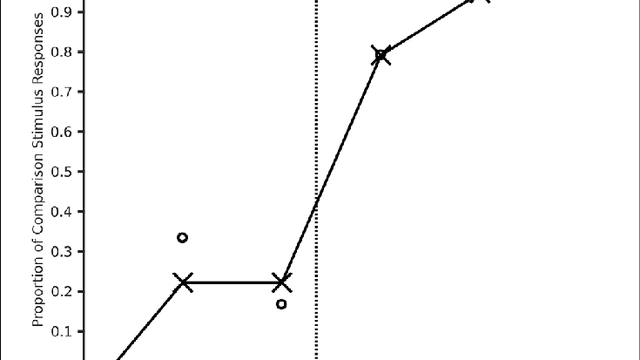 Spearman-Karber and WAVE method scripts
Reproducible scripts for psychophysical threshold estimation and timing analysis.
Spearman-Karber and WAVE method scripts
Reproducible scripts for psychophysical threshold estimation and timing analysis.Featured Publications
Articles in computational modelling 24
Cite Code Dataset Project ISMIR 2023 LBD ARME project Scores Onset annotations
Related Research Areas
Massimiliano Di Luca
Associate Professor in Psychology and Computer Science
Associate Professor in Psychology and Computer Science at the University of Birmingham, studying human perception and interaction in dynamic, technology-mediated environments.